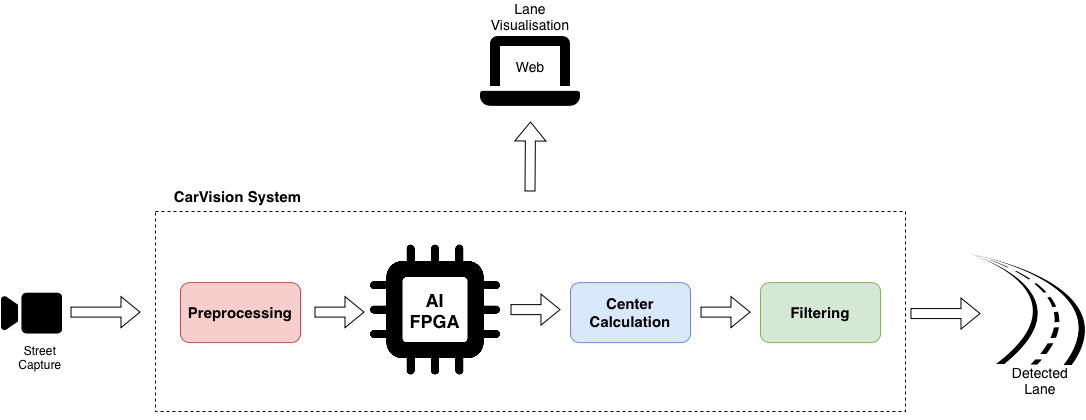
The CarVision System is a smart sensor which detects the street lane. The processed data can be used as an input for a steering control system in a regular car. The street is captured using a camera and an on-board AI detects the lane in the captured image. In a post processing step the deviation of a given set point (e.g. the lane center) is calculated. For best performance regarding computation power and energy consumption an FPGA has been used which implements the AI algorithm.
The sensor runs Embedded Linux for pre- and post processing the data. It also provides a simple webinterface to visualise the processed data.
In the video below, a live example of the AI used in the CarVision system can be seen.